My Research
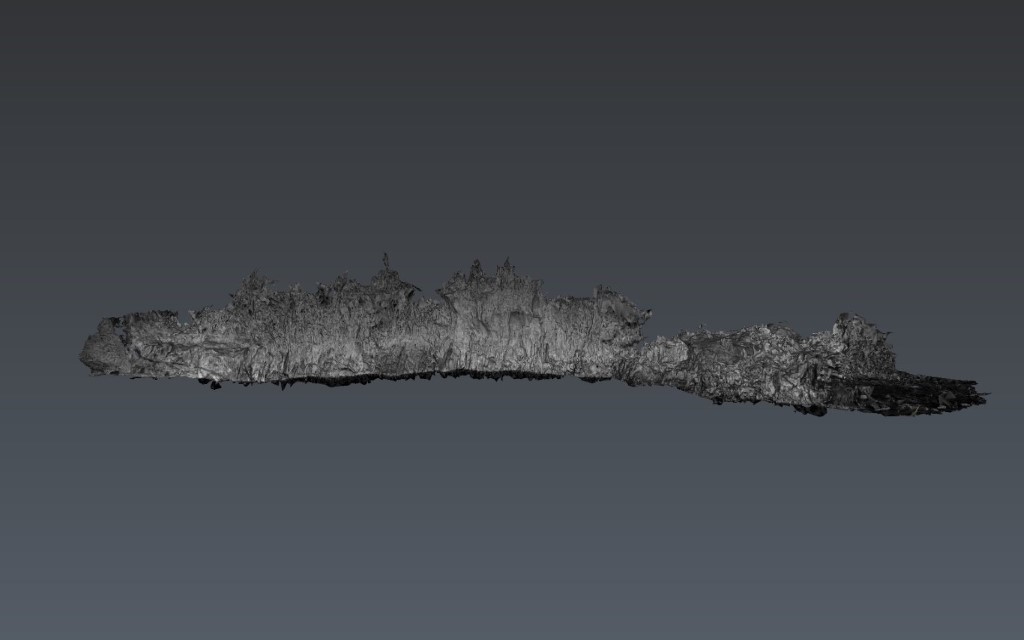
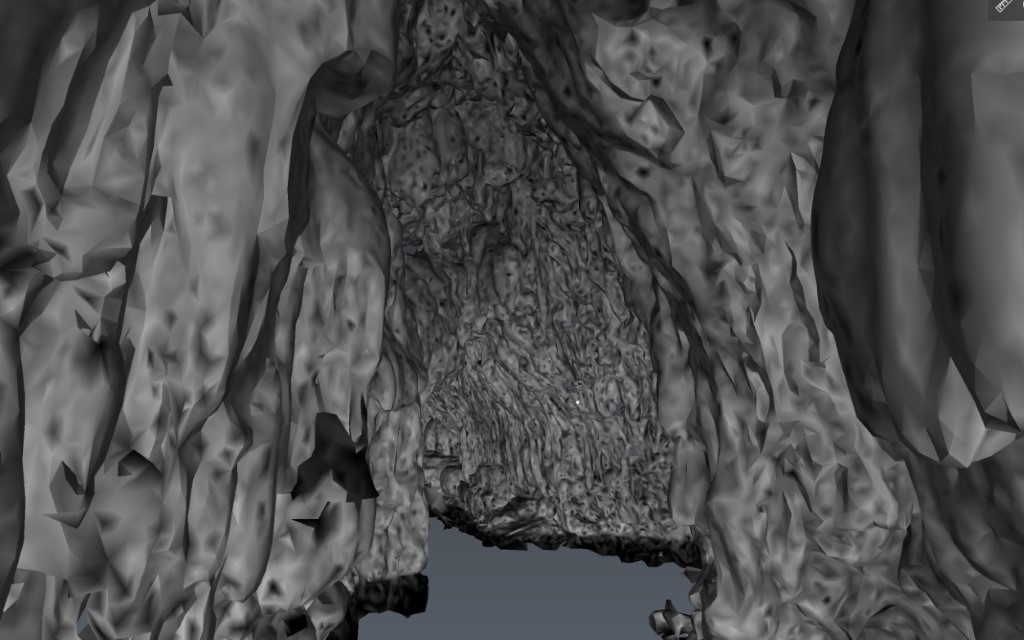
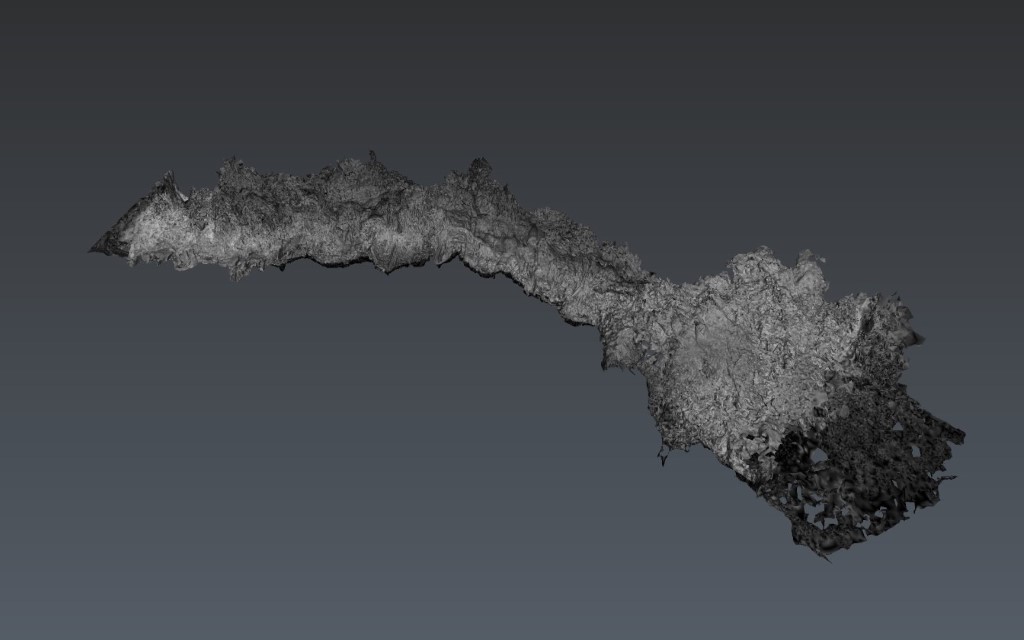
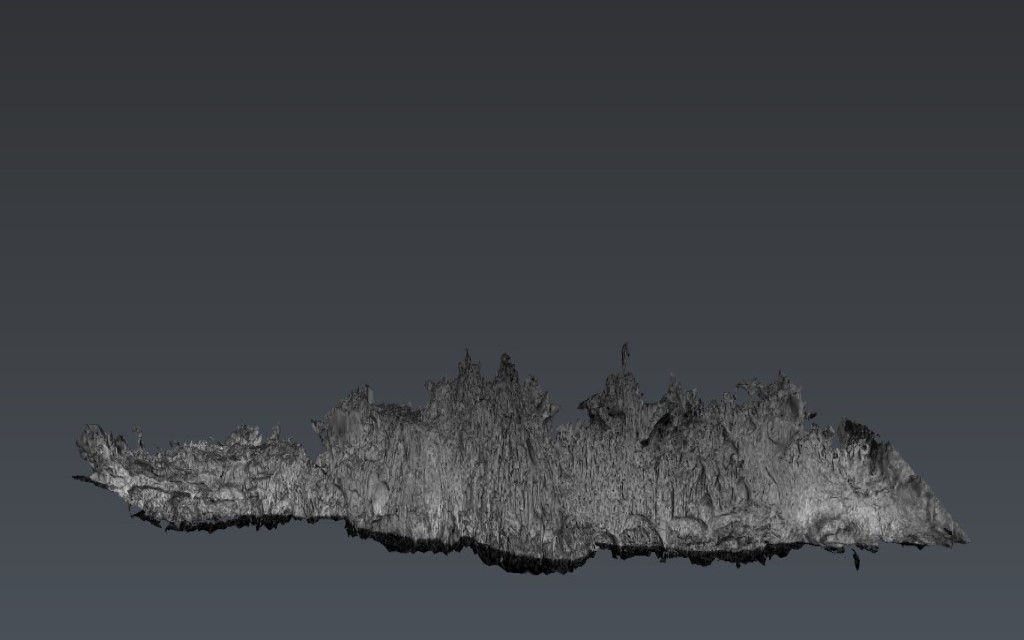
Starting in March 2022, I started studying LiDAR scanners in caves. LiDAR (Light Detection and Ranging) is a remote sensing method that uses lasers to measure the distance between the sensor and objects in the environment. It works by emitting a laser beam and measuring the time it takes for the beam to return to the sensor after it reflects off an object. My project’s goal was to make a playable environment where I could adventure through a 3D recreation of the caves I would scan with LiDAR. In partnership with Leica Geosystems, they sent me one of their state-of-the-art LiDAR scanners, the BLK2GO. With it’s portable technology, I was able to scan the rock of the cave in cramped spaces.
However, LiDAR, being a fairly new and immature technology, had many limitations, both in software and hardware. First off, LiDAR Technology is purely based on rays of light. However, if there is no light in the space that I am scanning, it cannot reflect off of rock, essentially creating either false coordinates, or no coordinates at all. As a solution to this, I brought my own 80,000 lumen light into the cave, so that the LiDAR Scanner can maximize the amount of points it reflects off per minute. Light is what colorizes the things we see. However, if you have ever experienced blue light, you’d notice that the entire room turns blue due to the light reflection. Since my light was artificial, it posed two problems. First, it was shining artificial light, which caused the room to be much lighter than it would be when exposed to sunlight. Secondly, my light was extremely bright, which caused the room to light up much more than expected. On top of that, the mud on the rock would reflect a grayish color due to its shade (brown). Colors aside, one significant human limitation I found in caves was the accessibility to scan the small holes in the wall. Although the BLK2GO would usually patch those, if there were some huge holes in the wall that I could not reach, it would lead to a low-density area in my scan. This caused many problems since the 3D virtualization of the cave would be incomplete. Finally, my LiDAR scanner, the BLK2GO, is portable. Therefore, it uses Geolocation to know where it is at all times (SLAM). However, in a cave, where there is no internet or geolocation, that service is unusable, forcing the device to use light reflection to see its change in location and rotation. This poses another major problem due to the constant fluctuation in location that happens for split seconds. Effectively, all of these limitations make the final result of the LiDAR scan less dense, colorful, and detailed than I had hoped.
Software wise, I also ran into many roadbumps. LiDAR Scanners can record billions of points in one session, which transfers into a lot of data. For example, one of my latest point-clouds (raw 3d virtualization) had a final composed environment of 200 megabytes (after meshing and texturizing). Viewing such big amounts of data is strenuous to even a high end pc, making it a struggle for the public to view my data. After much optimizing and debugging, I found a solution. By splitting my object into thousands of pieces, I was able to only make the pieces closest to the camera inside my app visible, essentially making it much more efficient.